




Planeediline reduktor on ülekandemehhanismina laialdaselt kasutusel erinevates inseneritavades, näiteks reduktorites, kraanades, planetaarreduktorites jne. Planeediline reduktor võib paljudel juhtudel asendada fikseeritud teljega hammasratta ülekandemehhanismi. Kuna hammasülekande protsess on liinikontakt, põhjustab pikaajaline haakumine hammasratta rikke, seega on vaja simuleerida selle tugevust. Li Hongli jt. kasutasid planetaarülekande haakimiseks automaatset haakimise meetodit ning said, et pöördemoment ja maksimaalne pinge on lineaarsed. Wang Yanjun jt. haakusid planetaarülekannet ka automaatse genereerimise meetodi abil ning simuleerisid planetaarülekande staatika- ja modaalsimulatsiooni. Selles artiklis kasutatakse võrgu jagamiseks peamiselt tetraeeder- ja heksaeederelemente ning lõpptulemusi analüüsitakse, et näha, kas tugevustingimused on täidetud.
1. Mudeli loomine ja tulemuste analüüs
Planeediliste käikude kolmemõõtmeline modelleerimine
Planetaarülekannekoosneb peamiselt hammasrattast, päikesehammasrattast ja planetaarhammasrattast. Selles töös valitud peamised parameetrid on: sisemise hammasratta hammaste arv on 66, päikesehammasratta hammaste arv on 36, planetaarhammasratta hammaste arv on 15, sisemise hammasratta välisläbimõõt on 150 mm, moodul on 2 mm, rõhunurk on 20°, hamba laius on 20 mm, lisandi kõrguskoefitsient on 1, tagasilöögikoefitsient on 0,25 ja planetaarhammasrattaid on kolm.
Planeediliste hammasrataste staatiline simulatsioonianalüüs
Materjali omaduste määratlemine: importige UG tarkvaras joonistatud kolmemõõtmeline planetaarülekande süsteem ANSYS-i ja määrake materjali parameetrid, nagu on näidatud allolevas tabelis 1:

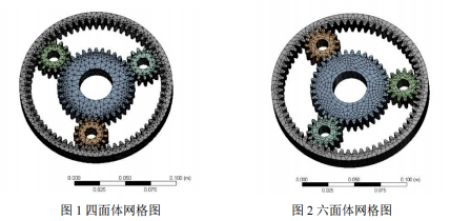
Võrgusilma moodustamine: Lõplike elementide võrk on jagatud tetraeedriks ja heksaeedriks ning elemendi põhisuurus on 5 mm. KunaplanetaarülekannePäikeseratas ja sisemine hammasratas on kontaktis ja võrk on võrgus, kontakt- ja võrguosade võrk on tihendatud ja suurus on 2 mm. Esmalt kasutatakse tetraeedrilisi võrke, nagu on näidatud joonisel 1. Kokku genereeritakse 105906 elementi ja 177893 sõlme. Seejärel võetakse kasutusele kuusnurkne võrk, nagu on näidatud joonisel 2, ja kokku genereeritakse 26957 rakku ja 140560 sõlme.
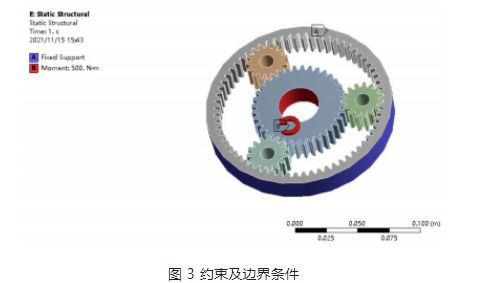
Koormuse rakendamine ja piirtingimused: vastavalt reduktori planetaarülekande tööomadustele on päikeseülekanne vedav hammasratas, planetaarülekanne on veetav hammasratas ja lõppväljund toimub planetaarkanduri kaudu. Kinnitage sisemine hammasratas ANSYS-is ja rakendage päikeseülekandele 500 N · m pöördemomenti, nagu on näidatud joonisel 3.
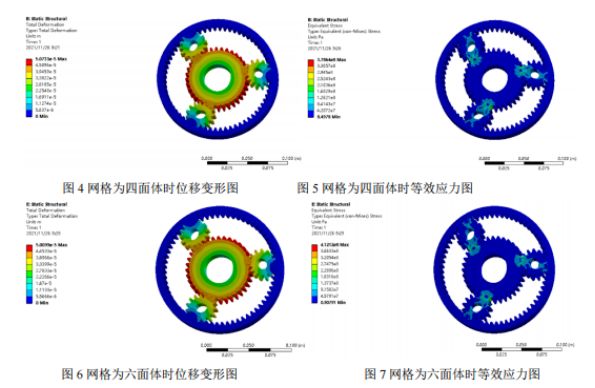
Järeltöötlus ja tulemuste analüüs: Allpool on esitatud kahest võrgujaotusest saadud staatilise analüüsi nihkenefogramm ja ekvivalentne pingenefogramm ning teostatud võrdlev analüüs. Kahe võrgutüübi nihkenefogrammist leitakse, et maksimaalne nihe toimub kohas, kus päikesehammasratas ei haaku planetaarhammasrattaga, ja maksimaalne pinge tekib hammasratta haarde juures. Tetraeedrilise võrgu maksimaalne pinge on 378 MPa ja kuusnurkse võrgu maksimaalne pinge on 412 MPa. Kuna materjali voolavuspiir on 785 MPa ja ohutustegur on 1,5, on lubatud pinge 523 MPa. Mõlema tulemuse maksimaalne pinge on väiksem kui lubatud pinge ja mõlemad vastavad tugevustingimustele.
2. Kokkuvõte
Planeedilise käigu lõplike elementide simulatsiooni abil saadakse käigukasti süsteemi nihkedeformatsiooni nefogramm ja ekvivalentne pingenefogramm, millest saadakse maksimaalsed ja minimaalsed andmed ning nende jaotusplanetaarülekannemudelit on võimalik leida. Maksimaalse ekvivalentpinge asukoht on ka koht, kus hammasratta hambad kõige tõenäolisemalt purunevad, seega tuleks sellele projekteerimise või tootmise ajal pöörata erilist tähelepanu. Planeedilise käigukasti kogu süsteemi analüüsi abil ületatakse ainult ühe hammasratta analüüsist tulenev viga.
Postituse aeg: 28. detsember 2022