




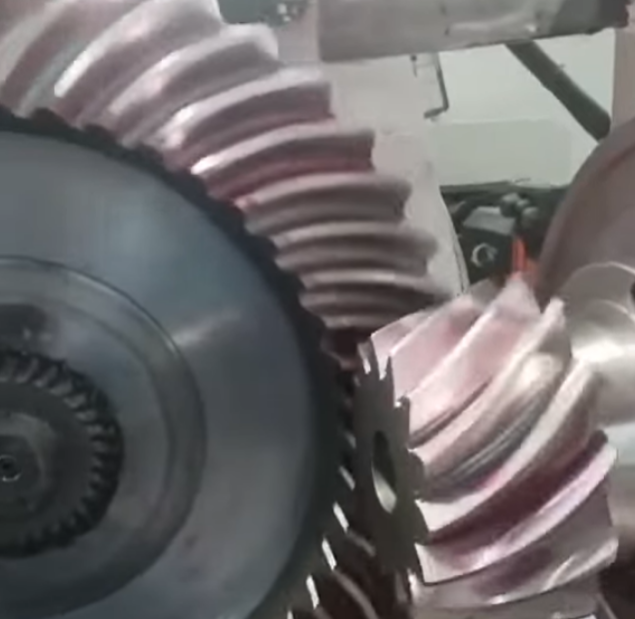
Gleasonspiraalsed kaldhammasrattadon spetsiaalsed kaldhammasrattad, mis on loodud jõu edastamiseks ristuvate võllide vahel, tavaliselt 90-kraadise nurga all. Gleasoni süsteemi eristab ainulaadne hammasgeomeetria ja valmistusmeetod, mis tagavad sujuva liikumise, suure pöördemomendi ja vaikse töö. Neid hammasrattaid kasutatakse laialdaselt autotööstuses, tööstuses ja lennunduses, kus töökindlus ja täpsus on kriitilise tähtsusega.
Gleasoni süsteem töötati välja sirgete janullkaldkäigud...sissejuhatades kumera, spiraalse kujuga hamba. See spiraalne kuju võimaldab hammaste järkjärgulist haardumist, vähendades oluliselt müra ja vibratsiooni, võimaldades samal ajal suuremat pöörlemiskiirust ja kandevõimet. See disain parandab ka kontaktsuhet ja pinna tugevust, tagades tõhusa jõuülekande raskete või dünaamiliste koormuste korral.
Iga Gleasoni spiraalhammasratta paar koosneb hammasrattast ja vastashammasrattast, mis on toodetud sobiva geomeetriaga. Tootmisprotsess on väga spetsiifiline. See algab legeerterasest toorikute, näiteks 18CrNiMo7-6, sepistamise või täppisvaluga, millele järgneb jämelõikamine, freesimine või vormimine, et luua hammasratta esialgne kuju. Täiustatud meetodid, nagu 5-teljeline töötlemine, hõõrdtöötlus ja kõvalõikamine, tagavad suure mõõtmete täpsuse ja optimeeritud pinnaviimistluse. Pärast kuumtöötlust, näiteks karastamist (58–60 HRC), läbivad hammasrattad soppimise või lihvimise, et saavutada hammasratta ja hammasratta vahel ideaalne hambumine.
Gleasoni spiraalhammasrataste geomeetriat määravad mitmed kriitilised parameetrid – spiraalnurk, survenurk, koonuse samm ja hammasratta laius. Need parameetrid arvutatakse täpselt, et tagada õiged hammaste kokkupuutemustrid ja koormuse jaotus. Lõpliku kontrolli käigus kontrollitakse selliste tööriistade nagu koordinaatmõõtemasin (CMM) ja hammaste kokkupuute analüüs (TCA) abil, et hammasrataste komplekt vastab nõutavale DIN 6 või ISO 1328-1 täpsusklassile.

Töökorras, Gleasoni spiraalkaldhammasrattadPakuvad suurt efektiivsust ja stabiilset jõudlust isegi nõudlikes tingimustes. Kumerad hambad tagavad pideva kontakti, vähendades pinge kontsentratsiooni ja kulumist. See teeb need ideaalseks autodiferentsiaalide, veoautode käigukastide, raskete masinate, mere jõuseadmete ja elektritööriistade jaoks. Lisaks võimaldab hammaste geomeetria ja kinnituskauguse kohandamise võimalus inseneridel optimeerida konstruktsiooni vastavalt konkreetsele pöördemomendile, kiirusele ja ruumipiirangutele.
Gleasoni tüüpi spiraalhammasrataste koonushammasrataste arvutustabel
| Ese | Valem / avaldis | Muutujad / Märkused |
|---|---|---|
| Sisendparameetrid | (z_1, z_2, m_n, alfa_n, Sigma, b, T) | Hammasratta/hammasratta hambad (z); normaalmoodul (m_n); normaalrõhunurk (\alpha_n); võlli nurk (\Sigma); pinna laius (b); edastatud pöördemoment (T). |
| Võrdlusläbimõõt (keskmine läbimõõt) | (d_i = z_i, m_n) | i = 1 (hammasratas), 2 (hammasratas). Keskmine/võrdlusläbimõõt normaallõikes. |
| Sammu (koonuse) nurgad | (\delta_1,\ \delta_2) nii, et (\delta_1 + \delta_2 = \Sigma) ja (\dfrac{\sin\delta_1}{d_1}=\dfrac{\sin\delta_2}{d_2}) | Lahenda koonuse nurgad, mis on kooskõlas hammaste proportsioonide ja võlli nurgaga. |
| Koonuse kaugus (pigi tipu kaugus) | (R = \dfrac{d_1}{2\sin\delta_1} = \dfrac{d_2}{2\sin\delta_2}) | Koonuse tipu ja ringikujulise ala vaheline kaugus, mõõdetuna piki genereerijat. |
| Ümmargune samm (normaalne) | (p_n = \pi m_n) | Lineaarne samm normaallõikes. |
| Põikmoodul (ligikaudne) | (m_t = ∫frac{m_n}{cos_beta_n}) | (\beta_n) = spiraali normaalne nurk; teisendab vastavalt vajadusele normaal- ja põiklõike vahel. |
| Spiraalnurk (keskmine/põiki suhe) | (\tan\beta_t = \tan\beta_n \cos\delta_m) | (\delta_m) = koonuse keskmine nurk; kasutage teisendusi normaal-, põik- ja spiraalnurkade vahel. |
| Näo laiuse soovitus | (b = k_b , m_n) | (k_b) valitakse tavaliselt vahemikus 8 kuni 20, olenevalt suurusest ja rakendusest; täpse väärtuse saamiseks konsulteerige projekteerimispraktikaga. |
| Lisand (keskmine) | (umbes m_n) | Standardne täissügavusega liitelähendus; täpsete väärtuste saamiseks kasutage täpseid hammaste proportsioonitabeleid. |
| Välisläbimõõt (ots) | (d_{o,i} = d_i + 2a) | i = 1,2 |
| Juure läbimõõt | (d_{f,i} = d_i – 2h_f) | (h_f) = dedendum (käigukasti proportsioonidest). |
| Ringikujulise hamba paksus (umbes) | (s \umx \dfrac{\pi m_n}{2}) | Kaldus geomeetria puhul kasutage täpsuse tagamiseks hambatabelitest korrigeeritud paksust. |
| Tangentsiaalne jõud kaldringil | (F_t = ∫frac{2T}{d_p}) | (T) = pöördemoment; (d_p) = sammu läbimõõt (kasutage ühtseid ühikuid). |
| Paindepinge (lihtsustatud) | (\sigma_b = \dfrac{F_t \cdot K_O \cdot K_V}{b \cdot m_n \cdot Y}) | (K_O) = ülekoormustegur, (K_V) = dünaamiline tegur, (Y) = vormitegur (paindegeomeetria). Projekteerimiseks kasutage täielikku AGMA/ISO painutusvõrrandit. |
| Kontaktpinge (Hertzi tüüpi, lihtsustatud) | (\sigma_H = C_H ∫qrt{\dfrac{F_t}{d_p , b} ∫cdot \dfrac{1}{\frac{1-\nu_1^2}{E_1}+\frac{1-\nu_2^2}{E_2}}}) | (C_H) geomeetriakonstant, (E_i,\nu_i) materjali elastsusmoodulid ja Poissoni suhtarvud. Kontrollimiseks kasutage täielikke kontakt-pinge võrrandeid. |
| Kontaktide suhe (üldine) | (\varepsilon = \dfrac{\text{toime kaar}}{\text{baaspigi}}) | Kaldus hammasrataste puhul arvutatakse sammkoonuse geomeetria ja spiraalnurga abil; tavaliselt hinnatakse hammasrataste projekteerimistabelite või tarkvara abil. |
| Virtuaalne hammaste arv | (z_v ∫₀ ∫₀) | Kasulik kokkupuute/alalõike kontrollimiseks; (m_t) = põikmoodul. |
| Minimaalsete hammaste / altlõigete kontroll | Kasutage minimaalset hammaste seisukorda, mis põhineb spiraalnurgal, rõhunurgal ja hammaste proportsioonidel | Kui (z) on miinimumist väiksem, on vaja altlõiget või spetsiaalset tööriista. |
| Masina/lõikuri sätted (projekteerimisetapp) | Lõikepea nurkade, hälli pöörlemise ja indekseerimise määramine hammasratta geomeetria põhjal | Need sätted tulenevad hammasratta geomeetriast ja lõikesüsteemist; järgige masina/tööriista protseduuri. |
Kaasaegne tootmistehnoloogia, näiteks CNC-kaldhammasrataste lõike- ja lihvimismasinad, tagab järjepideva kvaliteedi ja vahetatavuse. Arvutipõhise projekteerimise (CAD) ja simulatsiooni integreerimise abil saavad tootjad enne tegelikku tootmist teostada pöördprojekteerimist ja virtuaalset testimist. See minimeerib tarneaega ja kulusid, parandades samal ajal täpsust ja töökindlust.

Kokkuvõttes esindavad Gleasoni spiraalhammasrattad täiustatud geomeetria, materjali tugevuse ja tootmistäpsuse täiuslikku kombinatsiooni. Nende võime tagada sujuv, tõhus ja vastupidav jõuülekanne on teinud neist asendamatu komponendi tänapäevastes ajamisüsteemides. Olenemata sellest, kas neid kasutatakse autotööstuses, tööstuses või lennunduses, defineerivad need käigud jätkuvalt tipptasemel liikumist ja mehaanilist jõudlust.
Postituse aeg: 24. okt 2025